
Starting to get my Slick ready for the flying season here in the Midwest and realized I had never really revisited my radio setup since I originally finished the bird and got the basic trim in the ballpark. After writing articles for my club newsletter on the topic of servo linkage geometry it occurred to me to start with that before getting into advanced mixes and the like.
(To read those articles visit the article link on this webpage or click here: http://flyrc.info/articles/)
My Slick has a split elevator… i.e. each side of the elevator is a separate surface with each half driven by a servo. Both are setup identically so I will only discuss and show one example. Of course, once this one was finished I setup the other half with the exact same configuration. Here is what the original servo arm looked like.

It’s about 1 and 1/8th inch from output shaft to the ball link. On the other end of the linkage it’s 1 and 5/8ths inches from the hinge line to the ball link. That ratio results in a ~1.4x multiplier of the available torque (which per the specs for this servo is 333oz/in.) so 480 oz/in of torque. That’s awesome, so no concerns about stalling or blow back with these surfaces. Where I did get concerned was that when I checked the radio, my standard rate was set for 33% of travel!!
Here is my servo arm at full throw:

With that setting, I was only getting about 1/3rd of my 2048 possible steps from this servo. I would like to see a lot more of the available throw being used so that I’m not throwing away the precision of this servo. To get more servo travel in use without changing my overall travel at the surface I need to shorten the servo arm then increase my standard rate setting until the surface deflection is back to the current maximum. When finished I will have even more force applied to the surface (not needed here but it won’t hurt) and using more of the available travel on the radio will give me back more of the precision I’m looking for.
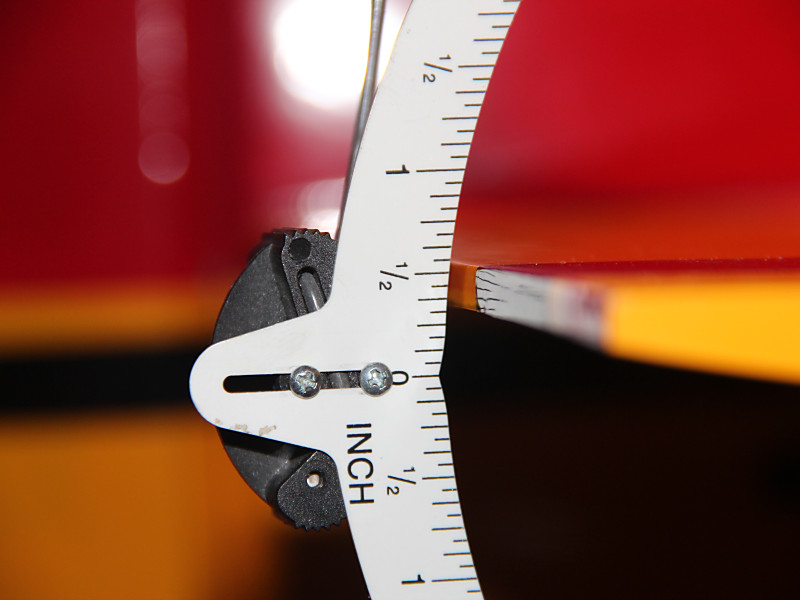
To start with I got out my deflection meter and measured the existing throws. I had two rates configured so I measured each. This shows the original measurement.

Once that was done I replaced the servo arm with a shorter arm resulting in a distance of around 5/8ths of an inch from servo output shaft to ball link on the new arm. Now it looks like this:

Now remeasuring the throw at full deflection (without changing the radio settings yet) results in this:
.
In order to get back to the original 3/4ths+ of an inch I ended up increasing my standard rate to about 66% which gets me double the precision I had before. Maybe my loops and partial loops will get smoother this season with all my newly acquired precision!
Of course I should point out that this whole process means I cannot dial in a large increase in throw just by adjusting my radio. It also means the speed of movement of my surfaces is slightly decreased. Neither of these are important to me as my constant goal with this airplane is to make it fly precision aerobatics. No 3D for this bird. She is all about smooth.
I’ll post more if I find other significant changes to make and try to update as I get into flying season and let you all know how the changes have affected its flight characteristics.
It’s a shame you don’t have a donate button! I’d without a doubt donate to this fantastic blog! I suppose for now i’ll settle for bookmarking and adding your RSS feed to my Google account. I look forward to new updates and will share this blog with my Facebook group. Talk soon!