During my recent posting about making servo linkage adjustments on my Slick, I found I had set the standard rate on the elevator to 33. This accomplished what I needed to do at the time, limiting my throw so that the Slick wouldn’t snap without full or nearly full application of elevator stick input but I wanted to get more out of my servo so I shortened the arm and managed to get the setting up to 66.
(you can read about that here: WH Slick Linkage Changes)
That was all to the good, but should I try to get more? How much of my precision am I giving up? If I did want to get more throw in the future, how much more could I get without reversing these changes?
First of all I’ll look at precision. Here’s how the math works out. If my servo is capable of 2048 steps and I only get all of those steps when I have maximum throw (60 degrees in each direction) then my setting of 33 in my Rates combined with my Travel setting defaulted to 100 was really limiting the precision that both the servo and radio are capable of! I was limiting my commands to a maximum of 2/3rds (45 degrees versus 60) of the original steps because of my Travel setting and then limiting it to use only 1/3rd of that possible throw. If my math is any good, I was using maybe 22% or 450 of the available 2048 steps. With my new configuration I still have the 100 Travel setting but I’m now using 2/3rds of those available steps which doubles the available steps to about 900. Hopefully this allows for more precision and less “slop” in the system. I am covering the same distance with twice the precision and that should result in more precise control and more exact centering. Even more of these changes (shorter servo arms and/or longer control horns) may be in the future but I’d like to do a bit of test flying before making more changes. For now I think this will be more than adequate. I hadn’t really noticed any elevator slop or lack of precision during past flights, but with many of these adjustments it can often be a case of not realizing what you were missing!
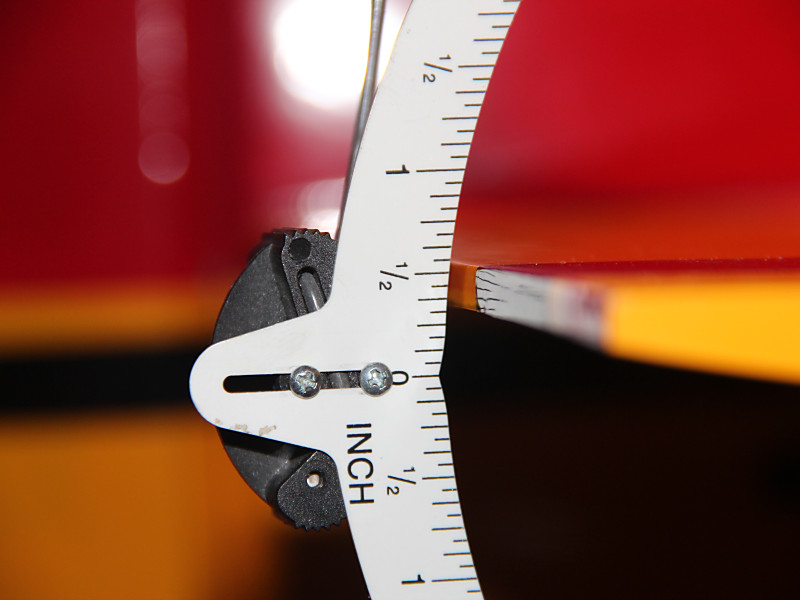
Finally, let’s look at travel. I know that my new setup gets me about 27 degrees of rotation at the servo and a little over 10 degrees or 3/4″ of motion at the elevator itself. This is slightly less than half of the available 60 degrees of rotation so I should be able to slightly more than double the existing throw if I should ever decide to do so. While 20 degrees or 1.5″ of travel isn’t what most 3D guys would consider huge, it’s far more than I will likely need for flying IMAC style precision aerobatics.
Based on these observations I certainly can continue down this path a bit farther but that decision will be based largely on actual flight testing. At this point that means waiting on some favorable weather.